
Remotebetrieb mit dem IC-705
Der IC-705 stellt über USB sowohl Audio- als auch Steuersignale zur Verfügung, was den hardwareseitigen Aufbau für eine Remotestation stark vereinfacht. Für die Anbindung ans Netz wurde ein Raspberry Pi 4 Einplatinencomputer gewählt, da dieser ausreichend Leistungsreserven bietet und trotzdem recht preisgünstig ist. Ältere Varianten (Pi2, Pi3) bzw. der neu erschienene Pi Zero 2 W sollten sich ebenso eignen.
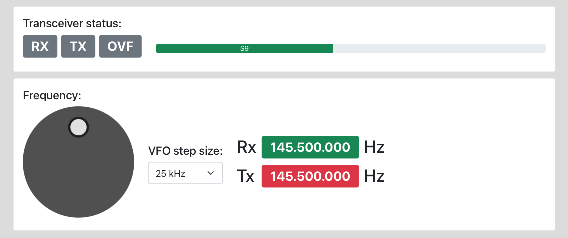
Kernanforderung ist, dass der Remotebetrieb möglichst über ein Smartphone (iPhone, Android) erfolgen soll, die Steuerung soll daher über ein Webinterface erfolgen.
Das nachstehende Blockschaltbild gibt einen Überblick über das Zusammenspiel der einzelnen Komponenten:
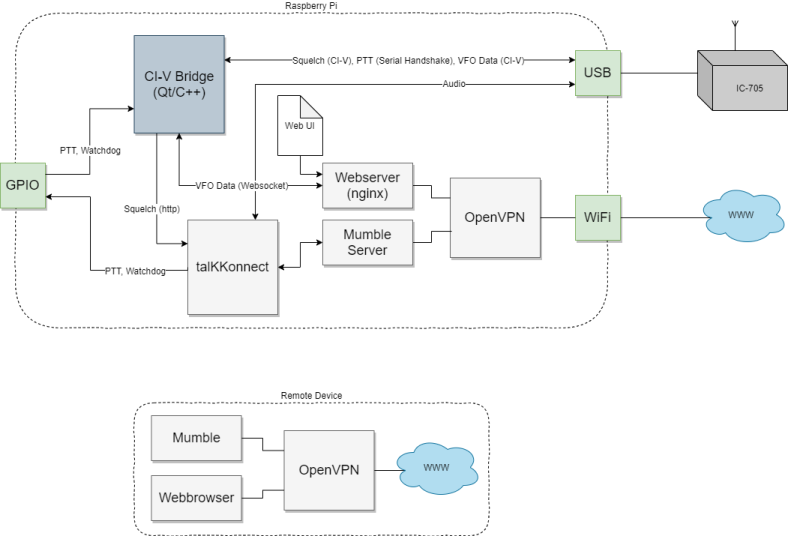
Grundidee ist, die Verbindung zwischen Smartphone und Raspberry Pi über einen VPN Tunnel herzustellen, damit sollte der Sicherheitsaspekt halbwegs abgedeckt sein. Außerdem ist damit der Raspberry Pi von „außen“ erreichbar, man benötigt keine (in der Regel kostenpflichtigen) Freischaltungen seitens des Internetproviders. OpenVPN ist hier eine gute Lösung, zumal dort der gewünschte Dienst kostenlos angeboten wird. Sofern man die Remoteverbindung nur innerhalb eines Lokalen Netzwerks (LAN, WLAN) aufbauen möchte, kann man auf die VPN Verbindung natürlich verzichten.
Die Sprachdaten werden via Mumble übertragen, dazu läuft auf dem Raspberry Pi ein eigener Mumble Server. Alternativ kann man natürlich einen bereits bestehenden Mumble-Server - z.B. im Hamnet – verwenden, der Kreativität sind keine Grenzen gesetzt!
Die „Hauptarbeit“ übernimmt aber der Mumble Client. Für diese Art von Anwendung gibt es auf der OpenSource-Plattform Github einen speziellen Mumble Client: talKKonnect (https://github.com/talkkonnect/talkkonnect)
Diese Software stellt die Verbindung zum Mumble Server her und verbindet sich auf der anderen Seite mit der Audio-Schnittstelle des Transceivers. Die (virtuelle) PTT-Taste von Mumble wird via eines GPIO Pins am Raspberry Pi zur Verfügung gestellt, in umgekehrter Richtung gibt es eine Schnittstelle via http.
Wie bereits erwähnt soll die Steuerung des Transceivers über ein Webinterface erfolgen, dazu ist ein Webserver (nginx) erforderlich, welcher die HTML- und JavaScript Dateien bereitstellt. Die Steuerdaten werden über einen eigenen Kanal (Websocket) übertragen.
Die Verbindung zwischen all diesen Komponenten stellt ein in Qt/C++ geschriebenes Programm her, der Sourcecode ist ebenfalls auf Github (https://github.com/pe-jot/QtCIV) verfügbar. Es kommuniziert seriell mit dem Steuerkanal des IC-705, via Websocket mit dem Webinterface und steuert und überwacht die Funktion von talKKonnect.
Da der Aufbau relativ umfangreich ist, habe ich diesen zumindest in groben Schritten mit den dazugehörigen Konfigurationsdateien in einem eigenen Github-Verzeichnis unter https://github.com/pe-jot/RemoteTRX dokumentiert.
Das Gesamtkonzept wurde schon durchaus erfolgreich getestet, es gibt aber noch Raum für Erweiterungen. So zum Beispiel fehlt die Möglichkeit, am Transceiver eingespeicherte Frequenzen auszuwählen, um z.B. eine Relaisablage oder CTCSS auswählen zu können. Ein weiterer offener Punkt wäre z.B. der Einsatz von hamlib, um andere Transceiver (Yaesu,…) über die CAT-Schnittstelle ansteuern zu können.
Abschließend noch ein rechtlicher Hinweis: Ein tatsächlicher Remotebetrieb erfordert die Genehmigung durch die Fernmeldebehörde (Antrag auf Änderung der Amateurfunkbewilligung)!
vy 73 de Philipp, OE5PJN
ADL512 - Ortsgruppe Wels
Mitglied des Oberösterreichischen Amateurfunkverband OAFV
ZVR-Zahl: 590807385
Kontakt
Vereinsweg 10
A-4600 Wels
Andreas Gallistl OE5AGM
oe5xwm oevsv.at